

Séance 3
Partie moteur
Lors de notre deuxième séance, nous avons choisis de placer un transistor MOS à commande logique car nous avons découvert sa capacité à pouvoir modifier la tension envoyée au moteur. Mais lors de cette troisième séance, nous en avons appris plus, notamment sur son fonctionnement.
Tout d’abord, il faut faire attention dans la façon de le brancher. La batterie doit être branchée au drain (D), et la sortie se trouve à la source (S).Ensuite, une autre chose importante a retenir est l’ouverture et la fermeture du transistor.

Lorsque VGS > Vs (tension de seuil) le transistor conduit
Lorsque VGS < Vs le transistor ne conduit pas
En plus du transistor, nous avons découvert que nous devrions ajouter à notre circuit, une diode de roue libre. A quoi sert-elle ? Et bien tout simplement a protéger des composants électroniques contre les fortes intensités lorsque l’interrupteur est ouvert.
Illustrons :
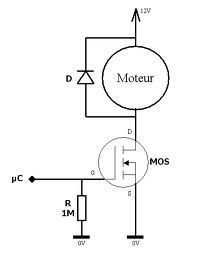
Quand nous avons l’interrupteur ouvert, le courant qui passe dans notre transistor mos est infini !! I= U/R et notre résistance R est proche de 0. Avec les 12 volts de la batterie divisés par 0, nous obtenons une valeur infinie qui cause une fusion instantanée de notre transistor.
Donc à l’aide de notre diode de roue libre, orientée dans le bon sens (retour vers l’entrée du moteur) le courant ne passe plus par notre transistor lorsqu’il est ouvert.



/https%3A%2F%2Fassets.over-blog.com%2Ft%2Fcedistic%2Fcamera.png)
/https%3A%2F%2Fstorage.canalblog.com%2F78%2F24%2F1038269%2F80090187_o.png)
/https%3A%2F%2Fstorage.canalblog.com%2F49%2F24%2F1038269%2F79224250_p.gif)